
Regular visitors will know we use the UWIS system to track our movements and camera positions as we work on the Vobster Photogrammetry Project.
But what if we turned the idea on its head? Instead of tracking the camera or diver as it moves around could we use the UWIS tracker units as a static control point?

Accurate drone work can depend on fixed and measured control points. They add constraint to the 3D model and manage and set overall scale and accuracy. This same method should work underwater – right?
There was only one way to find out – test the theory.
The plan was to place three UWIS trackers in the lake and leave them sitting there recording their position whilst making sure they were included in the source images. Attaching coded control points instantly helps locate them and includes a short scale for verifying the measurements.
Static Means Static
One thing that ruins photogrammetry are objects that move. The first task for buddy and helper Toni was to walk the control points around the car park and ask every diver to leave them alone. Moving a scale bar ruins things but moving a device gathering GPS data intended for fixed point reconstruction is really going to kill the test.
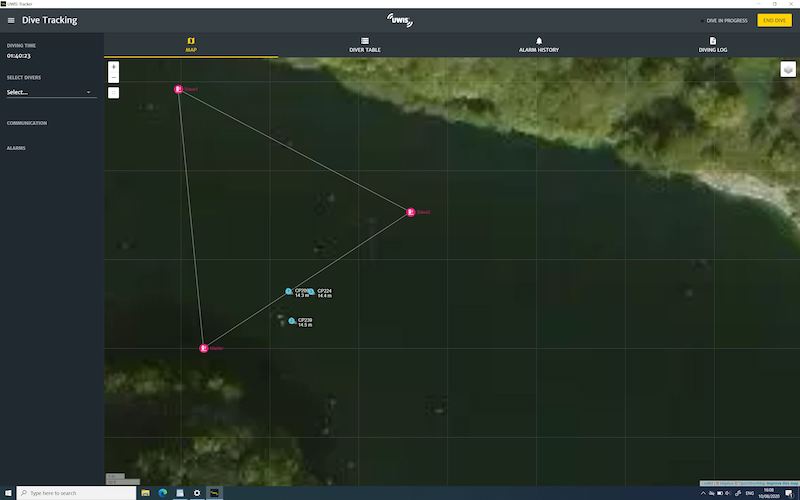
Once part of the quarry operations the crushing works is the perfect subject. Its not large but there is enough of interest to demonstrate capability. The first dive was short – just enough to cover the three control points before heading back to check via the UWIS Dive Tracker software to verify the targets were recording as intended.
Back on the quarry side we fired up the laptop. Right on cue three static points appeared revealing their location within the quarry. The dive log showed positions were being recorded and all was well.
For the second dive we took the opportunity to extend the model from crushing works to the aircraft before collecting the tracker units and existing. Two fairly short dives had gathered nearly 90 minutes worth of fixed point position information – more than enough for our needs.
Post Processing
After downloading images and log files we started to prepare the position data; cleaning out any erroneous values typically caused by a diver (me!) swimming over the top of a control point briefly blocking the signal.
Once filtered we had nearly 700 usable points from each of the tracker units so losing one or two was insignificant. For greater accuracy and redundancy more tracker units would be preferred but for testing we had more than enough.
The actual position was then averaged from the masses of latitude, longitude and depth recordings before being applied to the model in Metashape Professional.
Proof Enough
The combined scale bar & tracker unit control points worked well. Using coded control points quickly adds the markers and check bars proved the overall scale of the model was within 9% of real world reality.

Further post processing of the UWIS log may well refine this further. There is certainly plenty of scope for using additional post processing methods to push the boundaries of what the combination of photogrammetry and UWIS are capable of. The scope of recording over much larger areas and feeds more validated data into the wider Vobster project.
Whatever the use, we appreciate tools that can be used in differing ways and means and still deliver results.