
Scaling Verified
With the first testing and processing complete it was time to take stock. As regular readers will know we have been working with some very cool underwater navigation equipment from UWIS Oy. Using navigation we wanted to achieve several things;
- To know what areas of Vobster Quay we had covered on previous dives and not repeat the same area twice (or more).
- See what tracks we have covered during the dive.
- Reconstruct the 3D model and scale using GPS derived camera positions.

All of which were, to a greater or lesser extent, pushing at the boundaries of underwater photogrammetry. Using the UWIS tablet and navigation software gaining visual feedback of what we have covered via the ortho photo was perfect. The live update track log also gave showed us where we had been – no more finning and wondering if we were covering the track twice.
But the real killer was reconstruction with relative (in the 3D scene) and absolute (Location in world) accuracy. Would UWIS deliver consistent GPS coordinates that could build an accurate model? And if yes, how accurate?
The answer to those questions was partially answered on the second day of diving. For a full discussion on how things turned out (just great!) then check out this page.
Small…
The scale bars placed into the scene proved local scaling was pretty tight and with minimal variation. This exceeded our expectations…but what about the longer distances?
One reason we scanned the FV432 was simple; there is a wealth of documentation, including physical dimensions, and there are plenty of examples in private hands and in range of a tape measure.

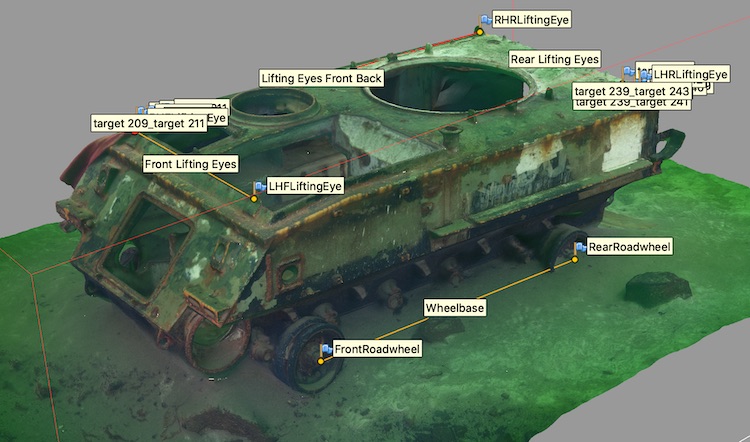

The results confirmed the 250mm check bar measurements dropped onto the top deck. All measurements of the armoured vehicle vary by just 2% between the real world and the 3D model.
…And Far Away
The second object we scanned was another diver attraction; the cabin cruiser Jaquin lying to the east. The quarry floor between them was scanned too, giving us a target to measure longer distances.

One of the team just happened to be a) a surveyor by trade and b) happened to have survey kit in the back of the car…thus the position of all buoys in sight were recorded. These values will prove invaluable as the work to cover the quarry…but right now we needed to check just one measurement – how far was it from the FV432 buoy to the Jaquin buoy?
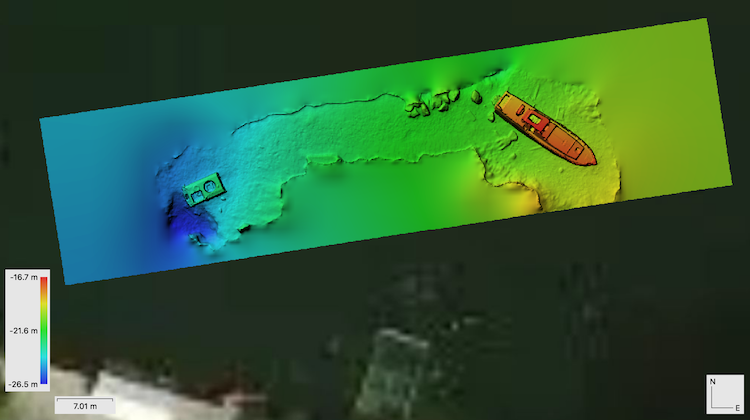
The measured distance between the buoys was not the same as true distance underwater between ropes on the 3D model. Comparison needed a bit of trigonometry.
The result was a variance between surveyed and reconstructed distances of 0.49m between the two values – just 1%. It’s worth remembering the model was reconstructed and scaled using just the estimated GPS positions of the camera.
The Results
We are now able to take any arbitrary measurement in the 3D model or the ortho photo, confident in the values and all driven from GPS position. Underwater photogrammetry may well never be quite the same again.
And so to the actual model:
The detailed ortho photo, as hosted by Dronelab:
Next Steps
All very encouraging with great results. We now need to see if we can repeat this success…watch this space!

2 thoughts on “From Here To There”
Comments are closed.